Oleh : Topan Trianto / Dosen Ma’soem University
mampu bernavigasi secara mandiri, maka pertanyaan besarnya adalah: bagaimana otak tersebut mendapatkan informasi yang akurat dari dunia luar? Jawabannya terletak pada sistem visi yang ditenagai oleh Deep Learning.
Dalam ekosistem Smart Car, sensor bukan lagi sekadar perangkat keras penangkap data, melainkan sistem persepsi aktif yang mampu menginterpretasikan realitas dengan tingkat presisi yang melampaui mata manusia.
1. Mata Digital: Melampaui Sekadar Kamera
Mobil masa depan dilengkapi dengan berbagai sensor seperti LiDAR (Light Detection and Ranging), Radar, dan kamera resolusi tinggi. Namun, tanpa AI, sensor-sensor ini hanya akan menghasilkan “sampah data” berupa jutaan titik koordinat dan piksel mentah.
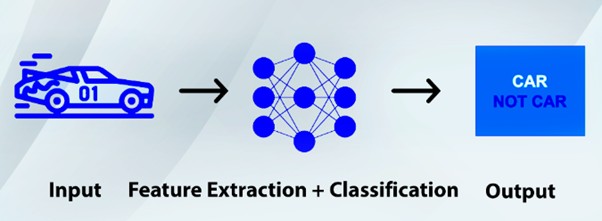
Di sinilah Deep Learning—khususnya arsitektur Convolutional Neural Networks (CNN)—berperan. Algoritma ini berfungsi untuk:
- Klasifikasi Objek: Membedakan antara tiang listrik, rambu lalu lintas, atau pengendara sepeda dalam berbagai kondisi pencahayaan.
- Segmentasi Semantik: Memahami batas-batas jalan, area trotoar, dan jalur hijau secara mendetail hingga ke tingkat piksel.
2. Sensor Fusion: Menyatukan Persepsi
Salah satu keunggulan utama Deep Learning adalah kemampuannya melakukan Sensor Fusion. Setiap sensor memiliki kelemahan; kamera kesulitan dalam gelap total, sementara Radar tidak bisa membaca tulisan di rambu jalan.
Dengan model AI yang canggih, kendaraan dapat menggabungkan input dari berbagai sensor tersebut secara simultan. Hasilnya adalah representasi lingkungan 360 derajat yang komprehensif. Proses ini memastikan bahwa jika satu sensor “tertipu” oleh kabut tebal, sensor lain tetap memberikan informasi yang valid untuk menjaga keamanan penumpang.
3. Adaptasi Real-Time terhadap Anomali
Kekuatan sejati dari visi berbasis Deep Learning adalah kemampuannya belajar dari skenario yang tidak terduga (edge cases). Melalui teknik Reinforcement Learning, sistem visi mobil terus dilatih untuk mengenali situasi langka, seperti hewan yang tiba-tiba melompat ke jalan atau genangan air yang menutupi lubang dalam.
Kemampuan adaptasi ini membuat sistem navigasi tidak hanya “melihat”, tapi benar-benar “memahami” konteks lingkungan yang mereka hadapi.
4. Menuju Efisiensi Komputasi: Edge AI
Masa depan sensor pintar juga terletak pada Edge AI, di mana pemrosesan Deep Learning dilakukan langsung pada perangkat sensor di mobil, bukan dikirim ke cloud terlebih dahulu. Hal ini menghilangkan latensi (jeda waktu), yang sangat krusial karena dalam kecepatan tinggi, keterlambatan sepersekian detik dalam memproses visi bisa menentukan keselamatan.
5. Deep Dive: Arsitektur di Balik Mata Digital
Untuk mencapai tingkat akurasi yang presisi, industri Smart Car saat ini mengandalkan dua arsitektur utama yang mendominasi bidang Computer Vision :
1. YOLO (You Only Look Once): Sang Spesialis Kecepatan
Dalam berkendara, kecepatan deteksi adalah segalanya. Arsitektur YOLO menjadi standar emas karena kemampuannya melakukan deteksi objek secara real-time. Berbeda dengan algoritma lama yang memindai gambar berkali-kali, YOLO memperlakukan deteksi objek sebagai masalah regresi tunggal, langsung dari piksel gambar ke koordinat kotak pembatas (bounding boxes) dan probabilitas kelas.
- Keunggulan: Latensi yang sangat rendah, memungkinkannya memproses hingga puluhan frame per detik (FPS) pada perangkat edge di dalam mobil.
- Aplikasi: Mendeteksi pergerakan mendadak dari kendaraan lain atau pejalan kaki yang muncul tiba-tiba di area blind spot.
2. Vision Transformers (ViT): Memahami Konteks Global
Jika YOLO unggul dalam kecepatan, Transformers—arsitektur yang awalnya populer di dunia pengolahan bahasa (NLP)—kini merambah dunia visi. Berbeda dengan CNN konvensional yang fokus pada area kecil di gambar, Vision Transformers menggunakan mekanisme Self-Attention.
- Keunggulan: Mampu memahami hubungan antar objek yang berjauhan dalam satu bingkai gambar. Misalnya, memahami bahwa lampu lalu lintas di ujung jalan berkaitan langsung dengan perilaku mobil di depannya.
- Aplikasi: Digunakan untuk Path Planning yang lebih kompleks dan pemahaman situasi lingkungan (scene understanding) secara menyeluruh, bukan sekadar mendeteksi satu per satu objek secara terpisah.
3. Sinergi YOLO dan Transformers dalam Smart Car
Integrasi keduanya menciptakan sistem penglihatan yang ideal: YOLO bertindak sebagai refleks cepat untuk menghindari tabrakan segera, sementara Transformers bertindak sebagai pemikir strategis yang memahami alur lalu lintas di sekitar kendaraan.
Dengan menyatukan kedua arsitektur ini, kendaraan tidak hanya memiliki “mata” yang tajam, tetapi juga memiliki “intuisi” visual yang memungkinkan mereka memprediksi risiko sebelum benar-benar terjadi.
Penutup
Visi tanpa batas yang ditawarkan oleh Deep Learning telah mengubah mobil dari sekadar alat transportasi menjadi asisten cerdas yang waspada setiap saat. Dengan perkembangan sensor pintar ini, kita semakin dekat dengan era di mana kecelakaan akibat kelalaian manusia (human error) dapat sepenuhnya dieliminasi.



